Protocolos de comunicación
En la presente práctica se realizó la evaluación de distintos protocolos de comunicación entre plataformas de sistemas embebidos, con el objetivo de analizar su desempeño en términos de velocidad y latencia. Se implementaron pruebas enviando 1000 mensajes entre dispositivos (ATMEGA328p / Arduino UNO y XIAO ESP32-S3) para registrar y analizar el tiempo de respuesta de cada protocolo.
Los protocolos evaluados fueron:
- UART
- I2C
- SPI
Para cada protocolo se documentan las conexiones físicas, los códigos y los resultados mediante gráficas de latencia.
UART
Conexión
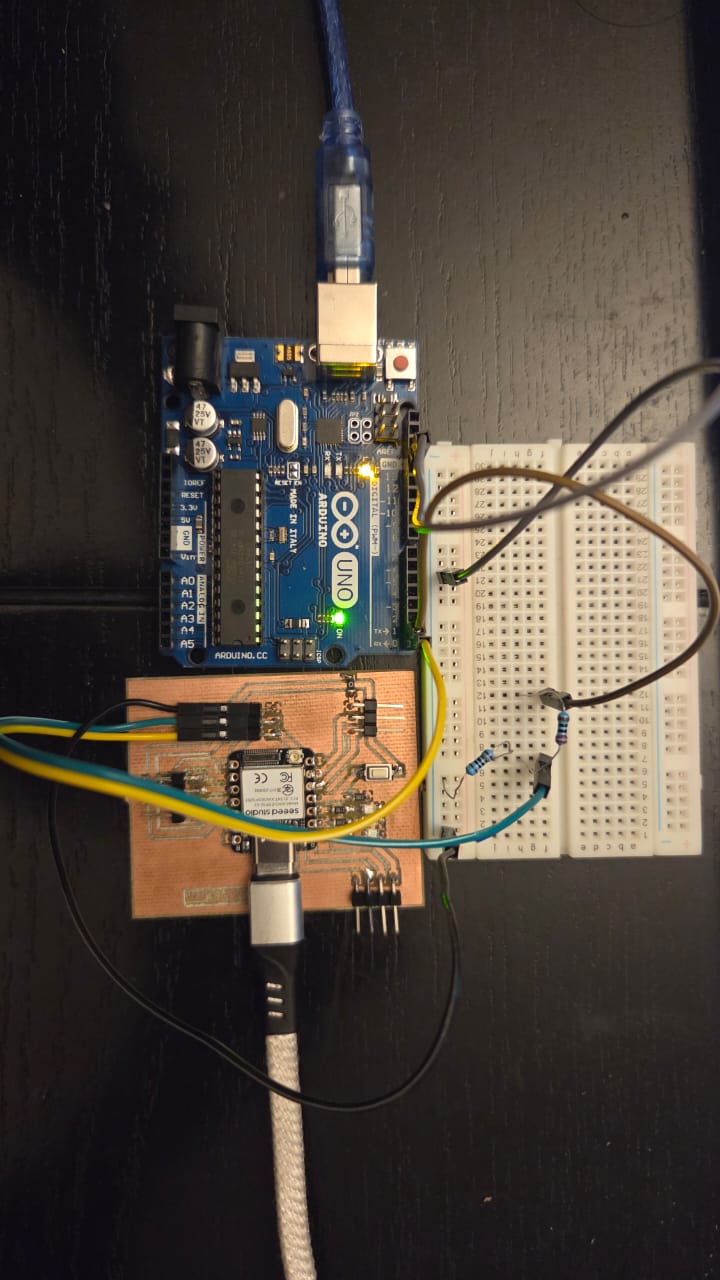
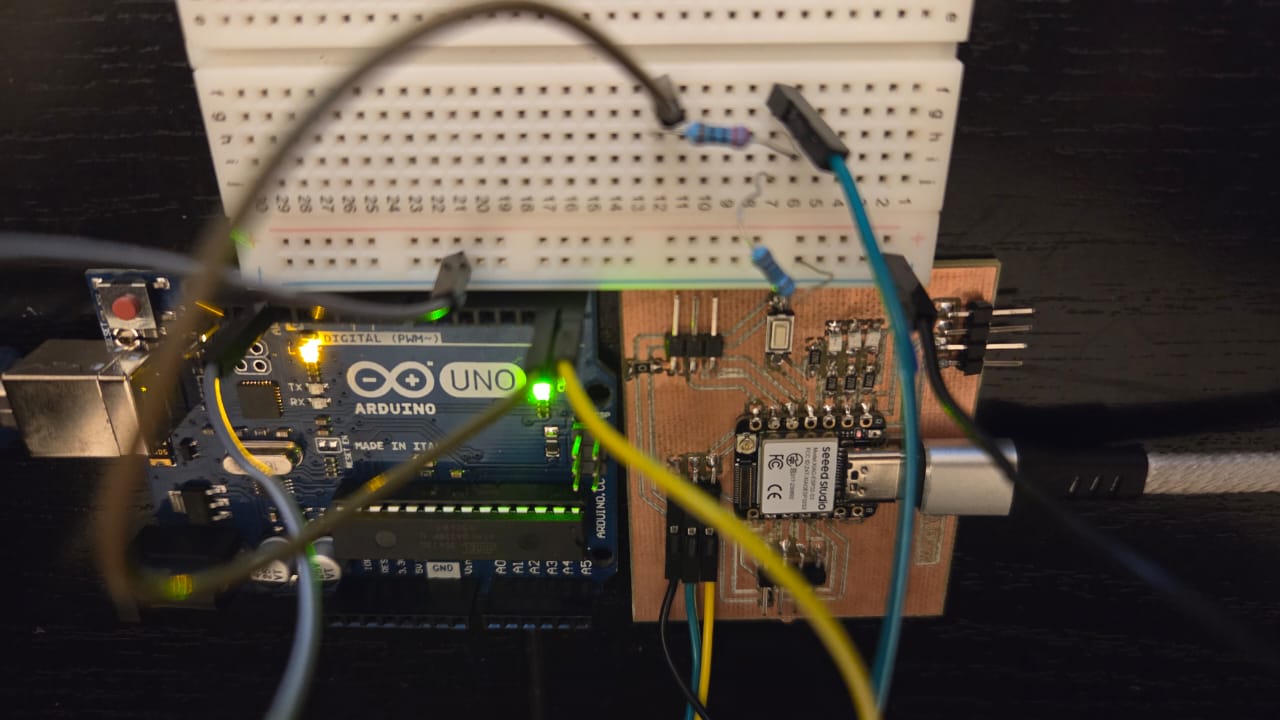
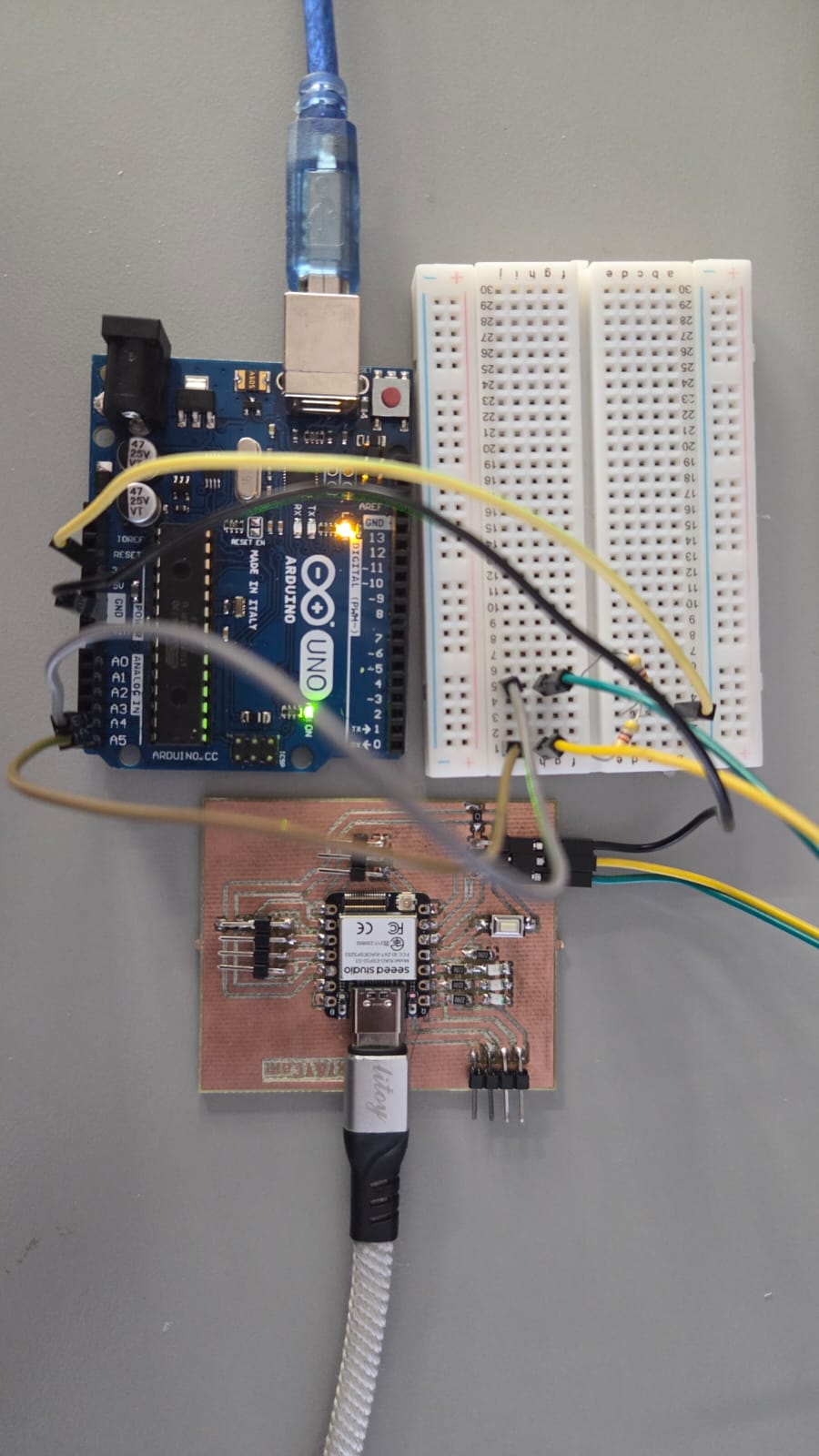
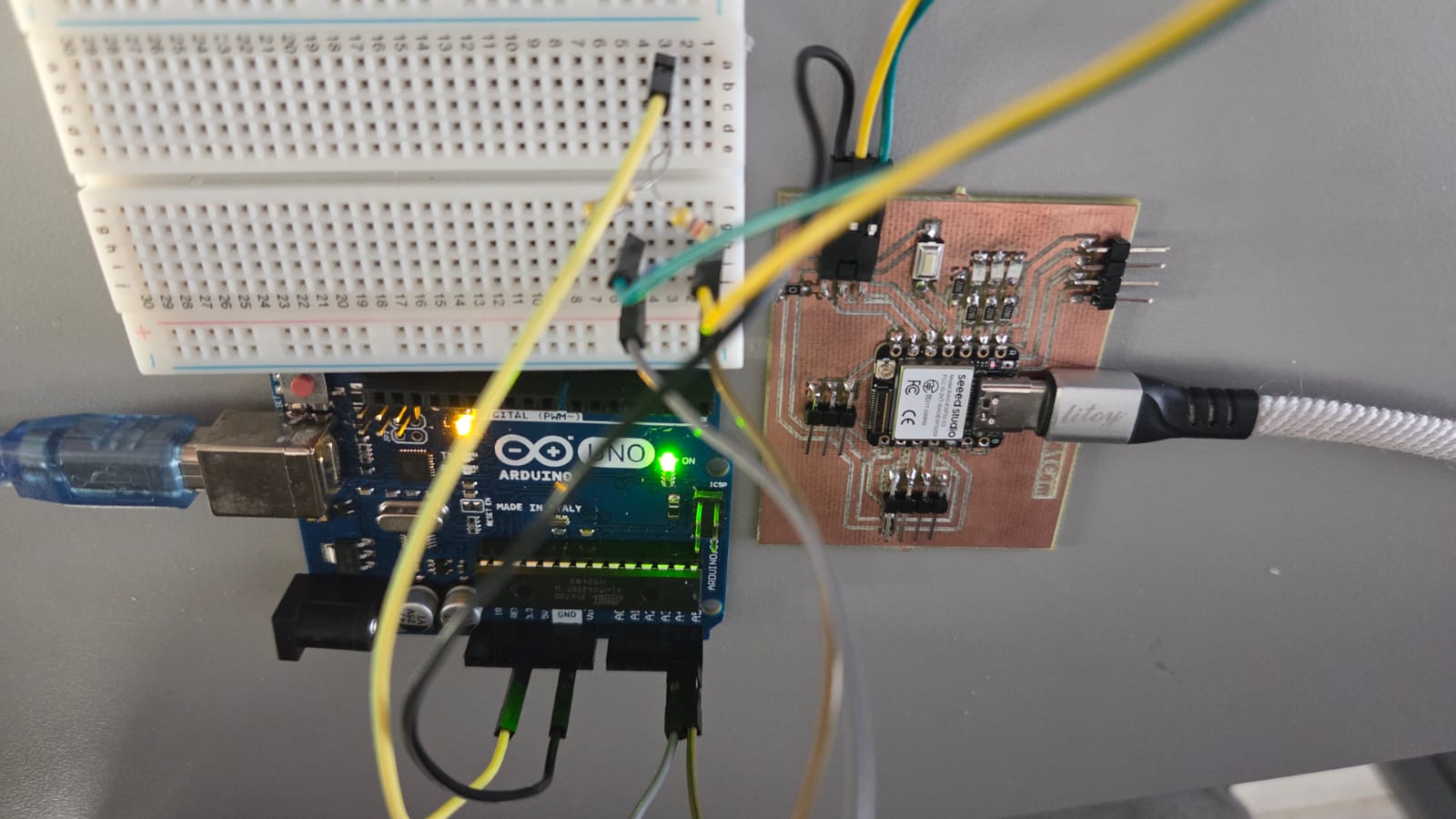
Se realizó la conexión física entre el Arduino UNO y el XIAO ESP32-S3 utilizando comunicación UART. Se compartió una referencia común de tierra (GND) y se conectaron los pines TX y RX correspondientes.
Para proteger al XIAO (3.3 V), se usó un divisor de voltaje con resistencias de 1 kΩ y 460 Ω para reducir de 5 V a ~3.4 V.
UART Arduino UNO (medición desde Arduino UNO)
Código (Arduino UNO)
Código Arduino UNO (UART desde Arduino UNO)
// ===== UART - Arduino UNO - MASTER =====
#define BAUD_RATE 115200
#define N_MSG 1000
String rxLine = "";
void setup() {
Serial.begin(BAUD_RATE); // D0(RX) / D1(TX)
delay(300);
// Header CSV
Serial.println("idx,rtt_us,latency_us");
}
void loop() {
static bool done = false;
if (done) return;
for (int i = 0; i < N_MSG; i++) {
unsigned long t0 = micros();
// Enviar PING
Serial.print("P,");
Serial.print(i);
Serial.print("\n");
// Esperar ACK A,<id>
rxLine = "";
while (true) {
if (Serial.available()) {
char c = Serial.read();
if (c == '\n') {
if (rxLine.startsWith("A,")) {
int id = rxLine.substring(2).toInt();
if (id == i) {
unsigned long t1 = micros();
unsigned long rtt = t1 - t0;
unsigned long lat = rtt / 2;
// CSV
Serial.print(i);
Serial.print(",");
Serial.print(rtt);
Serial.print(",");
Serial.println(lat);
break;
}
}
rxLine = "";
} else {
if (rxLine.length() < 40) rxLine += c;
}
}
}
}
done = true;
}
Código (XIAO ESP32-S3)
Código XIAO (UART desde Arduino UNO)
// ===== UART - XIAO ESP32-S3 - SLAVE =====
#define UART_RX_PIN D7
#define UART_TX_PIN D6
#define BAUD_RATE 115200
String buf = "";
bool isDigitChar(char c) { return (c >= '0' && c <= '9'); }
// valida exactamente: digits,digits,digits (para imprimir solo CSV limpio)
bool isCsvRow3(const String &s) {
if (s.length() < 5) return false; // mínimo "0,0,0"
if (!isDigitChar(s[0])) return false;
int commas = 0;
for (int i = 0; i < (int)s.length(); i++) {
char c = s[i];
if (c == ',') commas++;
else if (!isDigitChar(c)) return false;
}
return commas == 2;
}
void setup() {
Serial.begin(115200); // USB
delay(200);
Serial1.begin(BAUD_RATE, SERIAL_8N1, UART_RX_PIN, UART_TX_PIN);
Serial.println("XIAO: listo (CSV limpio)");
}
void loop() {
while (Serial1.available()) {
char c = Serial1.read();
if (c == '\n') {
// quitar CR si llega \r\n
if (buf.length() > 0 && buf[buf.length() - 1] == '\r') {
buf.remove(buf.length() - 1);
}
// 1) Responder a P,<id>
if (buf.startsWith("P,")) {
int id = buf.substring(2).toInt();
Serial1.print("A,");
Serial1.print(id);
Serial1.print("\n");
}
// 2) Imprimir SOLO CSV limpio al USB
if (buf == "idx,rtt_us,latency_us" || isCsvRow3(buf)) {
Serial.println(buf);
}
buf = "";
} else {
if (buf.length() < 140) buf += c;
else buf = "";
}
}
}
Resultados
A continuación se presenta la gráfica de latencia del protocolo UART midiendo desde Arduino UNO.
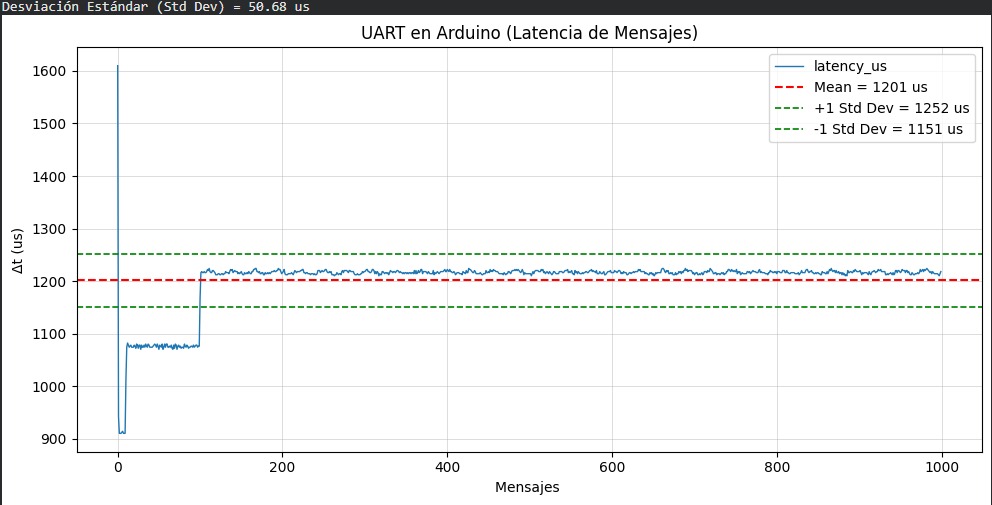 En la gráfica se observa que al inicio la latencia es menor y después se estabiliza cerca de ~1200 µs. Esto puede ocurrir porque al principio los buffers están vacíos y el sistema recién arranca; luego, al entrar en un flujo continuo, el tiempo se vuelve más constante.
—
En la gráfica se observa que al inicio la latencia es menor y después se estabiliza cerca de ~1200 µs. Esto puede ocurrir porque al principio los buffers están vacíos y el sistema recién arranca; luego, al entrar en un flujo continuo, el tiempo se vuelve más constante.
—
UART XIAO ESP32-S3 (medición desde XIAO)
Código (Arduino UNO)
Código Arduino UNO (UART desde XIAO ESP32-S3)
// ======== UART - Arduino UNO - SLAVE (eco) ========
const uint32_t BAUD = 115200;
void setup() {
Serial.begin(BAUD);
}
void loop() {
if (Serial.available()) {
int b = Serial.read();
if (b >= 0) Serial.write((uint8_t)b);
}
}
Código (XIAO ESP32-S3)
Código XIAO (UART desde XIAO ESP32-S3)
// ======== UART - XIAO ESP32-S3 - MASTER ========
#include <Arduino.h>
const uint32_t BAUD = 115200;
const int TX_PIN = D6;
const int RX_PIN = D7;
const uint16_t N_SAMPLES = 2000;
const uint32_t TIMEOUT_US = 30000;
static inline bool read_one_byte(uint8_t &out, uint32_t timeout_us) {
uint32_t start = micros();
while ((uint32_t)(micros() - start) < timeout_us) {
if (Serial1.available() > 0) {
int b = Serial1.read();
if (b >= 0) { out = (uint8_t)b; return true; }
}
}
return false;
}
void setup() {
Serial.begin(115200);
while (!Serial) { delay(10); }
Serial1.begin(BAUD, SERIAL_8N1, RX_PIN, TX_PIN);
Serial.println("idx,rtt_us,latency_us");
}
void loop() {
for (uint32_t i = 0; i < N_SAMPLES; i++) {
while (Serial1.available()) (void)Serial1.read();
uint8_t tx = (uint8_t)(i & 0xFF);
uint32_t t0 = micros();
Serial1.write(tx);
uint8_t rx = 0;
bool ok = read_one_byte(rx, TIMEOUT_US);
uint32_t t1 = micros();
if (!ok || rx != tx) {
Serial.print(i);
Serial.println(",nan,nan");
continue;
}
uint32_t rtt = t1 - t0;
uint32_t latency = rtt / 2;
Serial.print(i);
Serial.print(",");
Serial.print(rtt);
Serial.print(",");
Serial.println(latency);
}
while (true) delay(1000);
}
Resultados
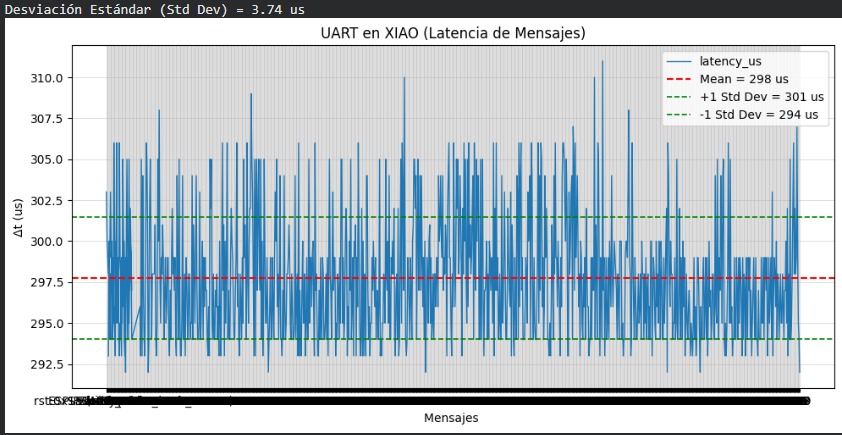 En esta gráfica de UART en el XIAO, la latencia se mantiene prácticamente constante alrededor de ~298 µs, con una dispersión muy baja (Std Dev ≈ 3.74 µs). A diferencia del caso anterior en Arduino (donde la latencia se estabilizaba cerca de ~1200 µs y con más variación), aquí el comportamiento es mucho más “limpio” y repetible, lo cual es consistente con un micro más rápido y con mejor manejo de la comunicación serial, reduciendo tiempos de espera y efectos de buffer.
—
En esta gráfica de UART en el XIAO, la latencia se mantiene prácticamente constante alrededor de ~298 µs, con una dispersión muy baja (Std Dev ≈ 3.74 µs). A diferencia del caso anterior en Arduino (donde la latencia se estabilizaba cerca de ~1200 µs y con más variación), aquí el comportamiento es mucho más “limpio” y repetible, lo cual es consistente con un micro más rápido y con mejor manejo de la comunicación serial, reduciendo tiempos de espera y efectos de buffer.
—
I2C
Conexión
Para el armado se hizo una conexión pull-up a 3.3 V para evitar daños en el XIAO, con 2 resistencias de 470 Ω. En I2C las líneas van directas (SDA con SDA y SCL con SCL).
I2C (XIAO mide RTT y Arduino reporta latencia interna)
Código (Arduino UNO)
Código Arduino UNO (I2C esclavo con latencia)
// ======= I2C - Arduino UNO - SLAVE (con latencia) =======
#include <Wire.h>
#define SLAVE_ADDR 0x08
volatile uint8_t last_token = 0;
volatile uint32_t t_rx = 0;
void onReceive(int n) {
while (Wire.available()) {
last_token = Wire.read();
}
t_rx = micros();
}
void onRequest() {
uint32_t latency = micros() - t_rx;
Wire.write(last_token);
Wire.write((uint8_t)(latency & 0xFF));
Wire.write((uint8_t)((latency >> 8) & 0xFF));
Wire.write((uint8_t)((latency >> 16) & 0xFF));
Wire.write((uint8_t)((latency >> 24) & 0xFF));
}
void setup() {
Wire.begin(SLAVE_ADDR);
Wire.onReceive(onReceive);
Wire.onRequest(onRequest);
// Mantener bus a 3.3V: pull-ups internos OFF
PORTC &= ~((1 << PC4) | (1 << PC5));
pinMode(A4, INPUT);
pinMode(A5, INPUT);
digitalWrite(A4, LOW);
digitalWrite(A5, LOW);
}
void loop() {}
Código (XIAO ESP32-S3)
Código XIAO (I2C maestro - mide)
// ========= I2C - XIAO ESP32-S3 - MASTER =========
#include <Wire.h>
#define SLAVE_ADDR 0x08
const int SDA_PIN = 5; // D4/SDA = GPIO5
const int SCL_PIN = 6; // D5/SCL = GPIO6
const uint32_t I2C_HZ = 100000;
const uint32_t N = 2000;
const uint32_t PAUSE_US = 200;
uint32_t readU32LE() {
uint32_t v = 0;
v |= (uint32_t)Wire.read();
v |= (uint32_t)Wire.read() << 8;
v |= (uint32_t)Wire.read() << 16;
v |= (uint32_t)Wire.read() << 24;
return v;
}
void setup() {
Serial.begin(115200);
while (!Serial) {}
Wire.begin(SDA_PIN, SCL_PIN);
Wire.setClock(I2C_HZ);
Serial.println("idx,rtt_us,echo_ok,arduino_latency_us");
}
void loop() {
static uint32_t idx = 0;
if (idx >= N) while (1) {}
uint8_t token = (uint8_t)(idx & 0xFF);
uint32_t t0 = micros();
Wire.beginTransmission(SLAVE_ADDR);
Wire.write(token);
uint8_t err = Wire.endTransmission();
if (err != 0) {
uint32_t rtt = micros() - t0;
Serial.printf("%lu,%lu,%d,%d\n", idx, rtt, 0, -1);
idx++;
delayMicroseconds(PAUSE_US);
return;
}
uint8_t got = Wire.requestFrom(SLAVE_ADDR, (uint8_t)5);
uint8_t echo = 0xFF;
uint32_t latency = 0xFFFFFFFF;
if (got == 5) {
echo = Wire.read();
latency = readU32LE();
}
uint32_t rtt = micros() - t0;
uint8_t ok = (echo == token) ? 1 : 0;
Serial.printf("%lu,%lu,%d,%ld\n",
idx, rtt, ok,
(latency == 0xFFFFFFFF) ? -1L : (long)latency);
idx++;
delayMicroseconds(PAUSE_US);
}
Resultados
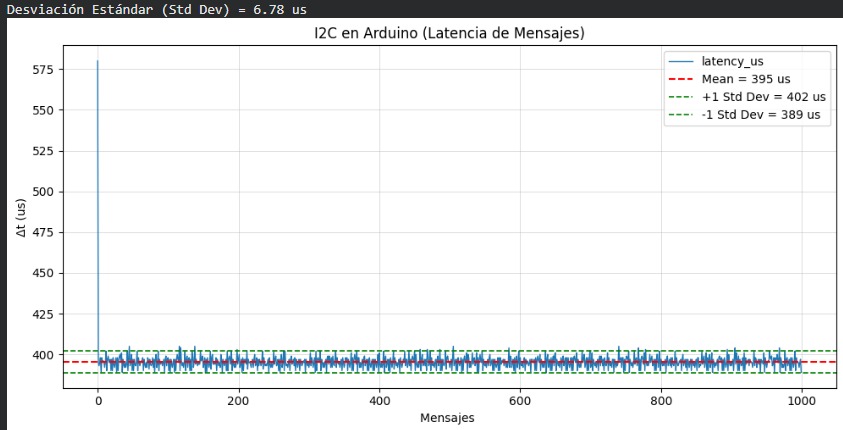 En la gráfica de I2C en Arduino se observa un pico aislado al inicio y después la latencia se mantiene muy estable alrededor de ~395 µs. Ese pico inicial suele estar relacionado con el arranque y la primera transacción (sincronización/inicialización del bus), pero una vez que el flujo de mensajes es continuo, el tiempo se vuelve consistente, con poca variación (Std Dev ≈ 6.78 µs), lo que indica una comunicación I2C bastante repetible en estas condiciones.
—
En la gráfica de I2C en Arduino se observa un pico aislado al inicio y después la latencia se mantiene muy estable alrededor de ~395 µs. Ese pico inicial suele estar relacionado con el arranque y la primera transacción (sincronización/inicialización del bus), pero una vez que el flujo de mensajes es continuo, el tiempo se vuelve consistente, con poca variación (Std Dev ≈ 6.78 µs), lo que indica una comunicación I2C bastante repetible en estas condiciones.
—
I2C (medición simple desde XIAO)
Código (Arduino UNO)
Código Arduino UNO (I2C esclavo simple)
// ====== I2C - Arduino UNO - SLAVE ======
#include <Wire.h>
#define SLAVE_ADDR 0x08
volatile uint8_t lastByte = 0;
void receiveEvent(int howMany) {
if (Wire.available()) lastByte = Wire.read();
}
void requestEvent() {
Wire.write(lastByte);
}
void setup() {
Wire.begin(SLAVE_ADDR);
Wire.onReceive(receiveEvent);
Wire.onRequest(requestEvent);
}
void loop() {}
Código (XIAO ESP32-S3)
Código XIAO (I2C maestro simple)
// =========== I2C - XIAO ESP32-S3 - MASTER ===========
#include <Wire.h>
#define SLAVE_ADDR 0x08
#define MAX_MSGS 1000
uint32_t idx = 0;
void setup() {
Serial.begin(115200);
Wire.begin();
Wire.setClock(400000);
Serial.println("idx,rtt_us");
}
void loop() {
if (idx >= MAX_MSGS) while (1) delay(1000);
uint32_t t0 = micros();
Wire.beginTransmission(SLAVE_ADDR);
Wire.write((uint8_t)(idx & 0xFF));
Wire.endTransmission();
Wire.requestFrom(SLAVE_ADDR, 1);
if (Wire.available()) Wire.read();
uint32_t rtt = micros() - t0;
Serial.print(idx);
Serial.print(",");
Serial.println(rtt);
idx++;
delay(5);
}
Resultados
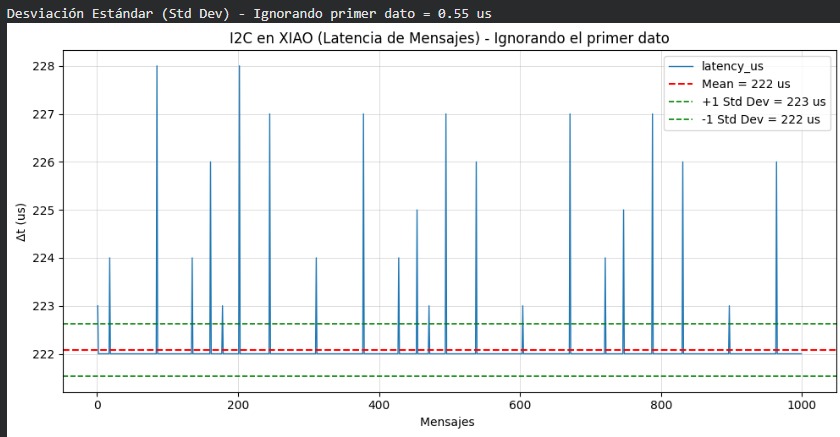 En la gráfica de I2C en el XIAO la latencia se concentra alrededor de ~222 µs (ya ignorando el primer dato), y la variación es mínima (Std Dev ≈ 0.55 µs). Aunque aparecen picos esporádicos, la mayoría de los mensajes se mantienen en un rango muy estrecho, lo que indica una comunicación muy consistente; en comparación con I2C en Arduino (~395 µs), el XIAO logra menor latencia, probablemente por su mayor capacidad de procesamiento y un manejo más eficiente del intercambio en el bus.
—
En la gráfica de I2C en el XIAO la latencia se concentra alrededor de ~222 µs (ya ignorando el primer dato), y la variación es mínima (Std Dev ≈ 0.55 µs). Aunque aparecen picos esporádicos, la mayoría de los mensajes se mantienen en un rango muy estrecho, lo que indica una comunicación muy consistente; en comparación con I2C en Arduino (~395 µs), el XIAO logra menor latencia, probablemente por su mayor capacidad de procesamiento y un manejo más eficiente del intercambio en el bus.
—
SPI
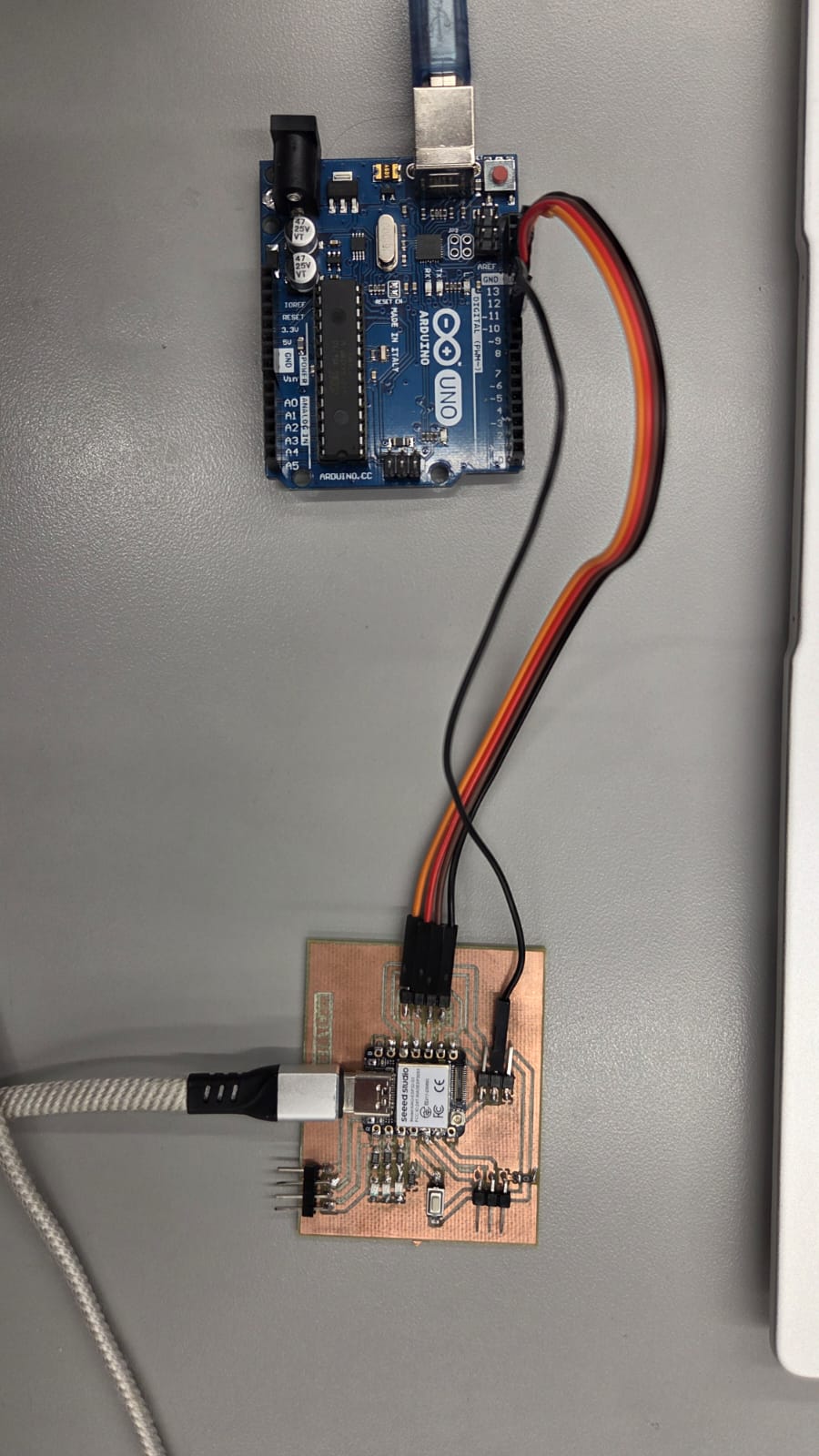
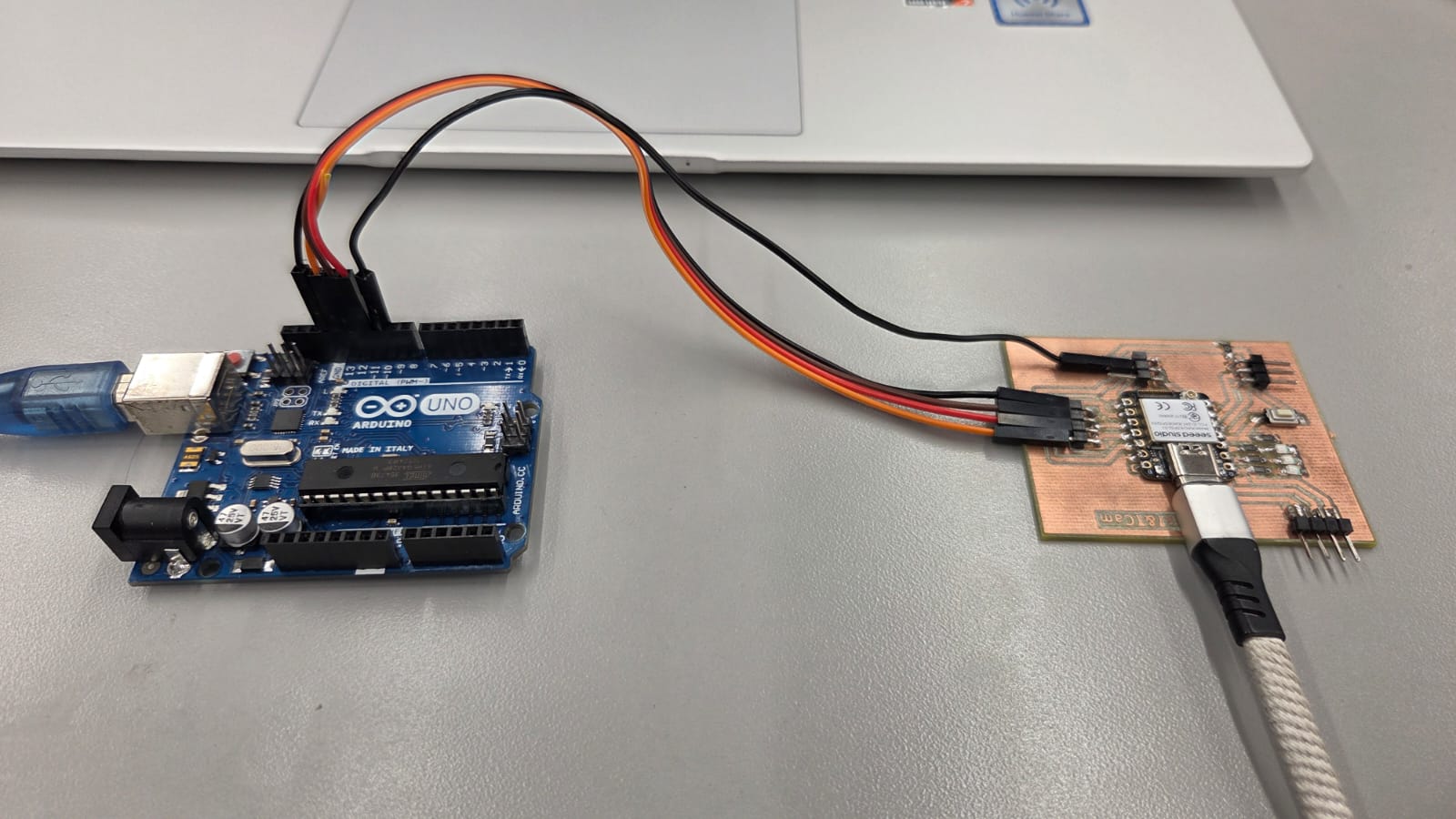
Conexión
Para el armado se hicieron conexiones directas (pin a pin). Idealmente se recomienda considerar adaptación de nivel de voltaje (UNO 5V vs XIAO 3.3V) para evitar riesgos.
SPI Arduino UNO (Arduino maestro)
Código (Arduino UNO)
Código Arduino UNO (SPI desde Arduino)
// ========== SPI - ARDUINO UNO - MAESTRO ==========
#include <SPI.h>
const uint8_t SS_PIN = 10;
const uint8_t CMD = 0xA5;
const uint16_t MAX_SAMPLES = 1000;
uint16_t idx = 0;
void setup() {
Serial.begin(115200);
pinMode(SS_PIN, OUTPUT);
digitalWrite(SS_PIN, HIGH);
SPI.begin();
SPI.setDataMode(SPI_MODE0);
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV64); // ~250 kHz
Serial.println("idx,spi_time_us,rx0,rx1");
}
void loop() {
if (idx >= MAX_SAMPLES) while (true) {}
uint32_t t0 = micros();
digitalWrite(SS_PIN, LOW);
uint8_t rx0 = SPI.transfer(CMD);
uint8_t rx1 = SPI.transfer(0x00);
digitalWrite(SS_PIN, HIGH);
uint32_t t1 = micros();
Serial.print(idx);
Serial.print(",");
Serial.print(t1 - t0);
Serial.print(",");
Serial.print(rx0);
Serial.print(",");
Serial.println(rx1);
idx++;
delay(5);
}
Código (XIAO ESP32-S3)
Código XIAO (SPI desde Arduino)
// =========== SPI - XIAO ESP32-S3 - SLAVE ===========
#include <Arduino.h>
extern "C" {
#include "driver/spi_slave.h"
#include "driver/gpio.h"
}
static const int PIN_SS = 7;
static const int PIN_SCK = 8;
static const int PIN_MOSI = 10;
static const int PIN_MISO = 9;
static const uint8_t CMD = 0xA5;
static uint8_t tx_buf[2];
static uint8_t rx_buf[2];
static uint8_t counter = 0;
void setup() {
spi_bus_config_t buscfg = {};
buscfg.mosi_io_num = PIN_MOSI;
buscfg.miso_io_num = PIN_MISO;
buscfg.sclk_io_num = PIN_SCK;
buscfg.quadwp_io_num = -1;
buscfg.quadhd_io_num = -1;
spi_slave_interface_config_t slvcfg = {};
slvcfg.spics_io_num = PIN_SS;
slvcfg.flags = 0;
slvcfg.queue_size = 1;
slvcfg.mode = 0;
esp_err_t ret = spi_slave_initialize(SPI2_HOST, &buscfg, &slvcfg, SPI_DMA_CH_AUTO);
if (ret != ESP_OK) while (true) delay(1000);
tx_buf[0] = 0; tx_buf[1] = 0;
rx_buf[0] = 0; rx_buf[1] = 0;
}
void loop() {
tx_buf[0] = counter;
tx_buf[1] = 0;
spi_slave_transaction_t t = {};
t.length = 2 * 8;
t.tx_buffer = tx_buf;
t.rx_buffer = rx_buf;
esp_err_t ret = spi_slave_transmit(SPI2_HOST, &t, portMAX_DELAY);
if (ret == ESP_OK) {
if (rx_buf[0] == CMD) counter++;
}
}
Resultados
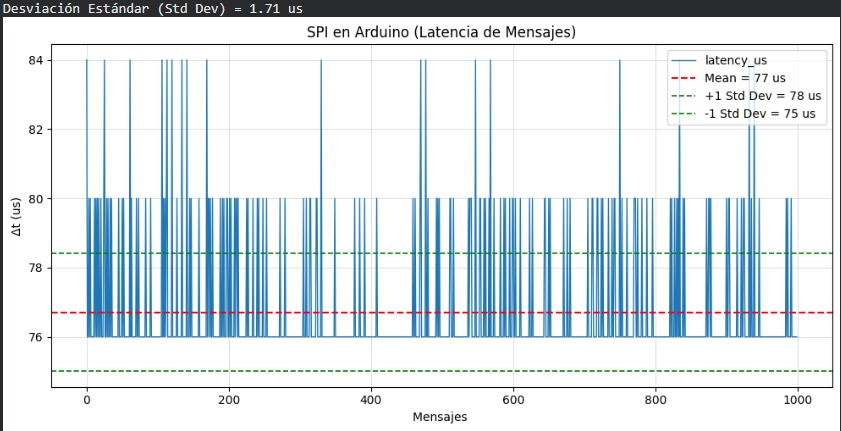 En la gráfica de SPI en Arduino la latencia promedio se mantiene alrededor de ~77 µs, con una variación baja (Std Dev ≈ 1.71 µs). Se notan algunos picos aislados, pero en general los valores se quedan dentro de un rango muy estrecho, lo que sugiere que SPI ofrece una comunicación rápida y bastante estable; esto es consistente con que SPI es un bus síncrono y normalmente tiene menos sobrecarga que UART o I2C.
—
En la gráfica de SPI en Arduino la latencia promedio se mantiene alrededor de ~77 µs, con una variación baja (Std Dev ≈ 1.71 µs). Se notan algunos picos aislados, pero en general los valores se quedan dentro de un rango muy estrecho, lo que sugiere que SPI ofrece una comunicación rápida y bastante estable; esto es consistente con que SPI es un bus síncrono y normalmente tiene menos sobrecarga que UART o I2C.
—
SPI XIAO ESP32-S3 (XIAO maestro)
Código (Arduino UNO)
Código Arduino UNO (SPI esclavo)
// ========== SPI - ARDUINO UNO - SLAVE ==========
#include <SPI.h>
volatile uint8_t replyByte = 0;
volatile uint8_t lastReceived = 0;
ISR(SPI_STC_vect) {
lastReceived = SPDR;
SPDR = replyByte;
if (lastReceived == 0xA5) replyByte++;
}
void setup() {
pinMode(MISO, OUTPUT);
pinMode(SS, INPUT_PULLUP);
SPCR |= _BV(SPE);
SPCR |= _BV(SPIE);
SPDR = replyByte;
}
void loop() {}
Código (XIAO ESP32-S3)
Código XIAO (SPI maestro)
// ========= SPI - XIAO ESP32-S3 - MASTER =========
#include <SPI.h>
static const int PIN_SS = 7;
static const int PIN_SCK = 8;
static const int PIN_MISO = 9;
static const int PIN_MOSI = 10;
static const uint8_t CMD = 0xA5;
static const uint16_t MAX_SAMPLES = 1000;
void setup() {
Serial.begin(115200);
while (!Serial) {}
pinMode(PIN_SS, OUTPUT);
digitalWrite(PIN_SS, HIGH);
SPI.begin(PIN_SCK, PIN_MISO, PIN_MOSI, PIN_SS);
Serial.println("idx,rtt_us,rx");
}
void loop() {
static uint16_t idx = 0;
if (idx >= MAX_SAMPLES) while (true) {}
SPI.beginTransaction(SPISettings(1000000, MSBFIRST, SPI_MODE0));
uint32_t t0 = micros();
digitalWrite(PIN_SS, LOW);
SPI.transfer(CMD);
SPI.transfer(0x00);
uint8_t rx = SPI.transfer(0x00);
digitalWrite(PIN_SS, HIGH);
uint32_t t1 = micros();
SPI.endTransaction();
Serial.print(idx++);
Serial.print(",");
Serial.print(t1 - t0);
Serial.print(",");
Serial.println(rx);
}
Resultados
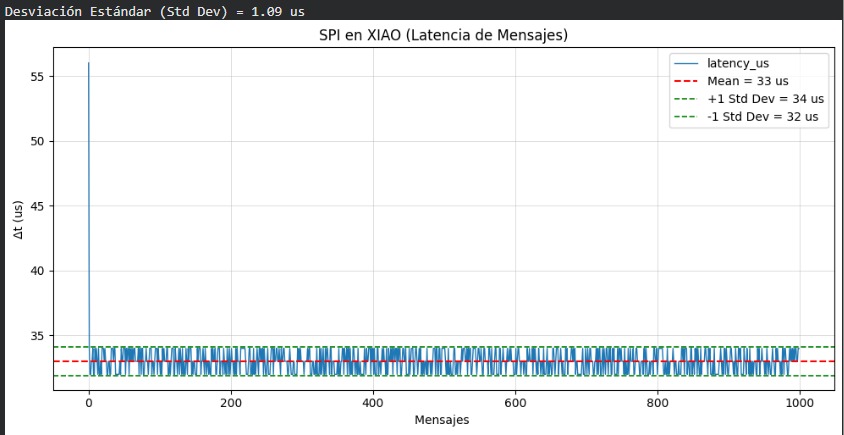 En la gráfica de SPI en el XIAO la latencia se mantiene muy estable alrededor de ~33 µs, con una dispersión aún menor (Std Dev ≈ 1.09 µs). Solo se observa un pico fuerte al inicio (típico del arranque/primera transacción), pero después el comportamiento es prácticamente plano. En comparación con SPI en Arduino (~77 µs), el XIAO reduce la latencia casi a la mitad, lo cual es consistente con su mayor velocidad de procesamiento y un manejo más eficiente del intercambio por SPI.
—
En la gráfica de SPI en el XIAO la latencia se mantiene muy estable alrededor de ~33 µs, con una dispersión aún menor (Std Dev ≈ 1.09 µs). Solo se observa un pico fuerte al inicio (típico del arranque/primera transacción), pero después el comportamiento es prácticamente plano. En comparación con SPI en Arduino (~77 µs), el XIAO reduce la latencia casi a la mitad, lo cual es consistente con su mayor velocidad de procesamiento y un manejo más eficiente del intercambio por SPI.
—
Obtención De Gráficas
Desde Google Colab se realizó un código general de forma que lee el .csv pertinente y posteriormente graficar cada uno de los resultados de latencia.
Código para gráficar latencias
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
from google.colab import drive
drive.mount('/content/drive')
# ---------- Latencias -----------
# =========================
# 1) Leer CSV directamente desde la ruta
# =========================
csv_name = 'Poner_aqui_el_csv.csv' # Usamos la ruta directa
# =========================
# 2) Leer CSV
# =========================
df = pd.read_csv(csv_name)
x = df["idx"]
y = df["latency_us"] # SIN convertir nada
# =========================
# 3) Estadísticas
# =========================
mean = y.mean()
std = y.std(ddof=0)
# Imprimir el valor de la desviación estándar
print(f"Desviación Estándar (Std Dev) = {std:.2f} us")
# =========================
# 4) Gráfica estilo latencia
# =========================
plt.figure(figsize=(10, 5))
plt.plot(x, y, linewidth=1.0, label="latency_us")
plt.axhline(mean, linestyle="--", linewidth=1.5, label=f"Mean = {mean:.0f} us",color='red')
plt.axhline(mean + std, linestyle="--", linewidth=1.2, label=f"+1 Std Dev = {mean+std:.0f} us",color='green') # Vuelve a añadir +1 Std Dev
plt.axhline(mean - std, linestyle="--", linewidth=1.2, label=f"-1 Std Dev = {mean-std:.0f} us",color='green') # Vuelve a añadir -1 Std Dev
plt.title("Donde se midió (Latencia de Mensajes)")
plt.xlabel("Mensajes")
plt.ylabel("Δt (us)")
plt.grid(True, linewidth=0.5, alpha=0.6)
plt.legend()
plt.tight_layout()
plt.show()